KS 系列 AGV 晶片產品路線
鯨鏈科技 KS 系列晶片專為智慧移動與 AGV(Automated Guided Vehicle)應用設計,採用台積電 N12 製程,從 KS-1 的基礎控制 逐步進化到 KS-3 的高階 AI 自主決策平台。
• KS-1 :RISC-V 多核心 + 基礎 NPU,專注於 AGV 基礎控制與路徑規劃,提供低功耗、彈性擴充與本地化支援。
• KS-2 :整合 CPU、GPU、NPU 的 SoC 系統單晶片,支援多感測器融合與即時環境感知,搭配 5G/V2X 通訊協定,
適合戶外導航與多車協作應用。
• KS-3 :高度整合 AIoT 平台,支援 AGV 自主決策、多模態感測與即時物體識別,符合工業車輛安全標準,並提供雲
端管理平台。
• KS-1 :RISC-V 多核心 + 基礎 NPU,專注於 AGV 基礎控制與路徑規劃,提供低功耗、彈性擴充與本地化支援。
• KS-2 :整合 CPU、GPU、NPU 的 SoC 系統單晶片,支援多感測器融合與即時環境感知,搭配 5G/V2X 通訊協定,
適合戶外導航與多車協作應用。
• KS-3 :高度整合 AIoT 平台,支援 AGV 自主決策、多模態感測與即時物體識別,符合工業車輛安全標準,並提供雲
端管理平台。
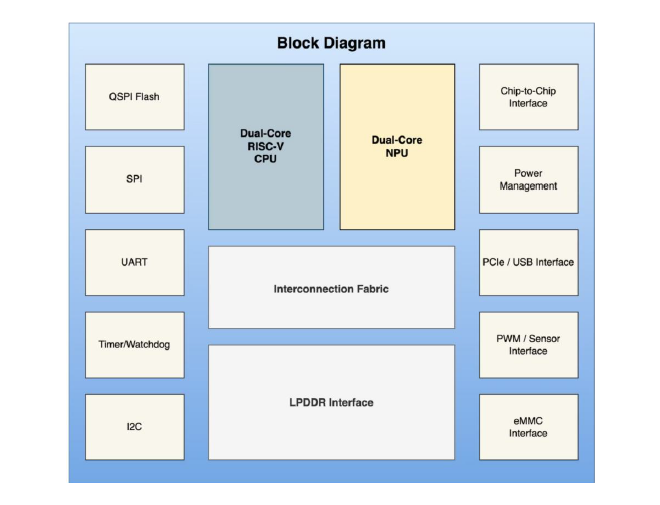
SoC 系統架構與技術規格
KS 系列晶片採用高整合 SoC 架構,搭載雙核心 RISC-V CPU、NPU 加速器,並在 KS-2/KS-3 引入 GPU 圖形處理器與更多感測器介面:
• CPU & GPU:支援 RTOS 與 Linux 雙系統,符合 OpenCL/GLES 3.2 標準,即時影像與地圖渲染能力強化。
• NPU:INT8/FP16 混合精度運算,16-32 TOPS 算力,支援 TensorFlow、ONNX 等 AI 框架。
• 通訊 & 感測:支援 CAN FD、5G NR、V2X、TSN 時間敏感網路,並能整合多達 8 路 LiDAR、IMU、超音波等感測資料,並支援雙
攝影機立體視覺處理,提升深度感知能力。
• 安全:雙核心鎖步 (Lock-step) 冗餘設計,支援 ASIL-C/D 車規安全等級,內建安全啟動與 OTA 更新機制。
• CPU & GPU:支援 RTOS 與 Linux 雙系統,符合 OpenCL/GLES 3.2 標準,即時影像與地圖渲染能力強化。
• NPU:INT8/FP16 混合精度運算,16-32 TOPS 算力,支援 TensorFlow、ONNX 等 AI 框架。
• 通訊 & 感測:支援 CAN FD、5G NR、V2X、TSN 時間敏感網路,並能整合多達 8 路 LiDAR、IMU、超音波等感測資料,並支援雙
攝影機立體視覺處理,提升深度感知能力。
• 安全:雙核心鎖步 (Lock-step) 冗餘設計,支援 ASIL-C/D 車規安全等級,內建安全啟動與 OTA 更新機制。